Implementing tasks in your application code requires you to pick the proper execution primitive (preemptible thread, cooperative thread, work queue, etc.) and set its priority correctly so that it does not block other tasks running on the CPU while also meeting the task’s time requirements.
One of the main goals of this lesson is to learn how to schedule application tasks using the right execution primitive with the right priority level. But before we can dive into the topic of choosing the right execution method to run a given task, we need to consider the following questions:
How does an nRF Connect SDK application boot up?
What are the out-of-the-box threads and ISR in an application, and what is their priority and execution nature?
What is the difference between interrupt and thread contexts, and what to do in each?
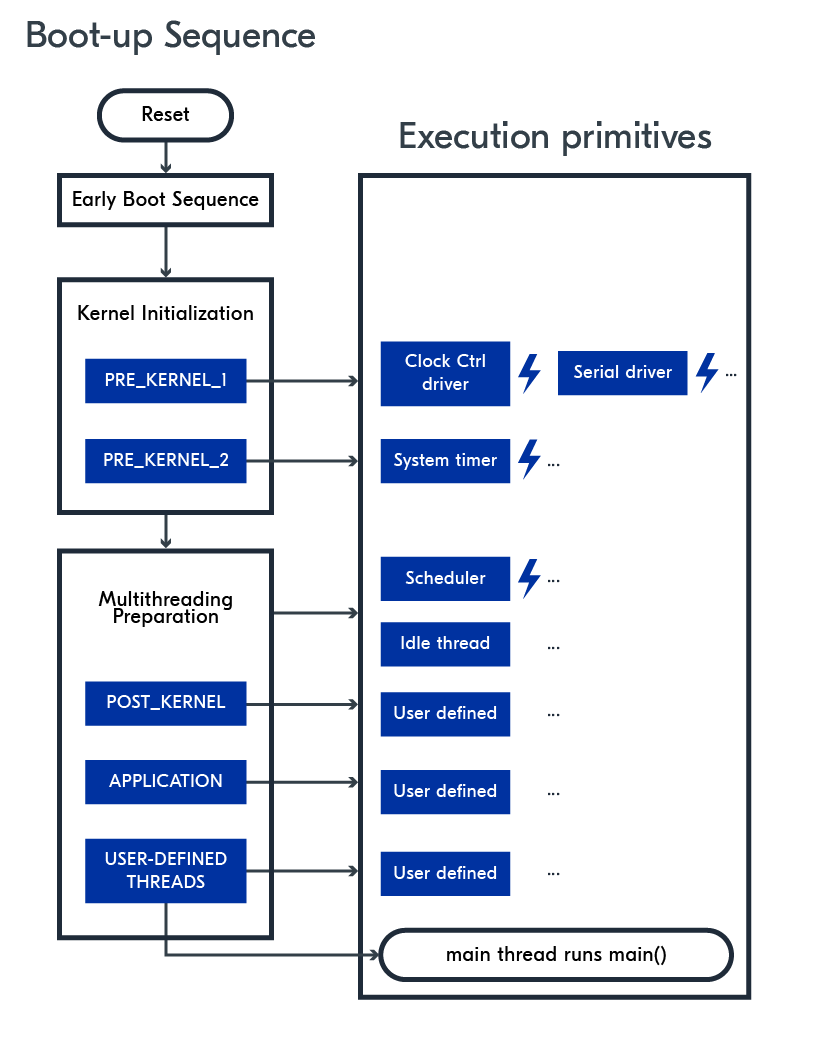
Boot-up sequence
1. Early Boot Sequence (C Code Preparation phase)
The primary function of the early boot sequence is to transition the system from its reset state to a state where it becomes capable of executing C code, thereby initiating the kernel initialization sequence. This stage is a pretty standard phase in embedded devices; as an application developer, it is not of much interest.
2. Kernel Initialization
This stage presents a process of initializing the state for all enabled static devices. Some devices are enabled out-of-the-box by the RTOS, while others are enabled by your application configuration file (prj.conf) and your board configuration files as we learned in the nRF Connect SDK Fundamentals course. These latter devices encompass device driver and system driver objects that are defined using Zephyr APIs in a static manner.
The initialization order is controlled by assigning them to specific run levels (for example, PRE_KERNEL_1 , PRE_KERNEL_2), and their initialization sequence within the same run level is further defined using priority levels. Keep in mind that at this stage, the scheduler and the Kernel services are not yet available, so these initialization functions do not rely on any Kernel services. We will dive into driver initialization in Lesson 7.
2.1. What gets initialized in PRE_KERNEL_1 by default in all nRF Connect SDK applications
Clock Control driver: This enables support for the hardware clock controller. The hardware can provide clock for other subsystem, and thus can be also used for power efficiency by controlling their clock.
A serial driver: This can be UART(E), RTT, or other transports. It is used to send the debugging output, such as the boot-up banner. This gets initialized only if the debugging option is enabled.
2.2. What gets initialized in PRE_KERNEL_2 by default in all nRF Connect SDK applications
System Timer driver: This is usually a Real-time counter peripheral (RTC1) on Nordic SoCs and SiPs (nRF91, nRF53, nRF52 Series). On the nRF54 Series, it’s the global real-time counter peripheral (GRTC). The System Timer will be used for the timing services of the kernel, such as k_sleep() and the kernel timer API.
Important
The list of devices does not include all devices that get initialized in your application. The list only provides the minimal core devices needed by the RTOS. The devices and subsystems initialized will depend on your application configuration and your board configuration file. In the next lesson, we will dive more into how to find out all configured devices and subsystems.
3. Multithreading Preparation
This is where the multithreading features get initialized, including the scheduler. The RTOS will also create two threads (System threads): The RTOS main thread,and the idle thread that is responsible for calling the power management system of the SiP and SoC if no other threads are ready.
During this phase, the POST_KERNEL services are initiated, if any exist. Once the POST_KERNEL services are initiated, the Zephyr boot banner is printed:
*** Booting nRF Connect SDK v2.x.x ***
After that, the APPLICATION level services are initialized, if any exist. Then, all application-defined static threads (using K_THREAD_DEFINE()) are initiated.
3.1. What gets initialized in POST_KERNEL by default in all nRF Connect SDK applications
This is where many libraries, RTOS subsystems, and services get initialized. These libraries require kernel services during configuration so this is why they are initiated in the POST_KERNEL level, where the kernel services are available.
By default, the RTOS does not initialize anything here. However, there are many libraries, RTOS subsystems, and services that get initialized here if they are enabled. For instance, if logging (CONFIG_LOG)is enabled with deferred mode, this is where the logger module gets initiated, and the logger-dedicated thread (for deferred mode) gets created. Also, if Bluetooth Low Energy is used (CONFIG_BT), this is the location where the Bluetooth stack gets initialized, and the RX and TX threads get created. Similarly, if the system work queue is used, this is the location where the system work queue thread is initialized.
3.2. What gets initialized in APPLICATION by default in all nRF Connect SDK applications
By default, some libraries get initiated here if they are enabled. For instance, if you are developing on the nRF91 Series and you are using the AT Monitor Library (AT_MONITOR), this is the location where this library gets initialized.
The RTOS main thread is the currently active thread. After all initializations are done, it will call your main() function at the end, if it exists. If no user-defined main() exists, the RTOS main thread will terminate, and the scheduler will pick the next ready thread for execution. This could be a user-defined thread, a subsystem thread, or the idle thread if there are no ready threads. The type and priority of the threads decide which thread will execute. This is something we will cover in the next topics.
Note
For multi-core hardware such as the nRF5340 SoC, other peripherals, such as the mailbox (mbox), will be initialized on bootup by the SDK. When Trusted Firmware-M is used, an entropy source such as the psa-rng peripheral will be initialized as well.
After boot-up, there will be several threads and interrupts set up. In the next section, we will compare the context where interrupts run in, called interrupt context, and the context where threads run in, called thread context.
Thread context vs interrupt context
Interrupt and thread contexts refer to different execution contexts with distinct characteristics and intended usages. Let’s explore each context and the allowed and not allowed operations within them:
Thread context
Execution Context: Thread context refers to the normal execution environment where application and system threads run. Triggering Event: Threads are created by the application or the RTOS and scheduled by the scheduler using defined rules (type and priority). Preemption: Thread context can be preempted by an interrupt or higher-priority threads. You can find more details on this in the Scheduler in-depth topic. Duration: Threads can execute longer and perform more complex operations than interrupt context.
Allowed Operations:
Access to the full range of kernel services and OS services.
Executing time-consuming operations.
Waiting on synchronization primitives like mutexes, semaphores, or event flags.
Performing blocking I/O operations.
Not Allowed Operations:
Accessing hardware registers directly without proper synchronization or abstraction.
Running time-critical operations.
Interrupt context
Execution Context: Interrupt context refers to the execution environment when an interrupt handler is running. Triggering Event: Interrupts can happen completely asynchronously at any time and are triggered by hardware events, such as timers, external signals, or device I/O. Preemption: Interrupt context preempts the currently running thread context. Duration: Interrupt handlers are expected to execute quickly to minimize the delay from servicing the interrupt and to not block the execution of system threads and communication stacks threads. Interrupts Nesting: Zephyr allows nested interrupts, meaning an interrupt handler can be interrupted by another interrupt of higher priority.
Allowed Operations:
Executing time-critical operations.
Access to a restricted set of kernel services.
Not Allowed Operations:
Blocking operations.
Using most of the kernel services meant for thread context (for example, sleeping or waiting on synchronization primitives, acquiring a mutex or a semaphore that is potentially blocking).
Nordic Developer Academy Privacy Policy
1. Introduction
In this Privacy Policy you will find information on Nordic Semiconductor ASA (“Nordic Semiconductor”) processes your personal data when you use the Nordic Developer Academy.
References to “we” and “us” in this document refers to Nordic Semiconductor.
2. Our processing of personal data when you use the Nordic Developer Academy
2.1 Nordic Developer Academy
Nordic Semiconductor processes personal data in order to provide you with the features and functionality of the Nordic Developer Academy. Creating a user account is optional, but required if you want to track you progress and view your completed courses and obtained certificates. If you choose to create a user account, we will process the following categories of personal data:
Email
Name
Password (encrypted)
Course progression (e.g. which course you have completely or partly completed)
Certificate information, which consists of name of completed course and the validity of the certificate
Course results
During your use of the Nordic Developer Academy, you may also be asked if you want to provide feedback. If you choose to respond to any such surveys, we will also process the personal data in your responses in that survey.
The legal basis for this processing is GDPR article 6 (1) b. The processing is necessary for Nordic Semiconductor to provide the Nordic Developer Academy under the Terms of Service.
2.2 Analytics
If you consent to analytics, Nordic Semiconductor will use Google Analytics to obtain statistics about how the Nordic Developer Academy is used. This includes collecting information on for example what pages are viewed, the duration of the visit, the way in which the pages are maneuvered, what links are clicked, technical information about your equipment. The information is used to learn how Nordic Developer Academy is used and how the user experience can be further developed.
2.2 Newsletter
You can consent to receive newsletters from Nordic from within the Nordic Developer Academy. How your personal data is processed when you sign up for our newsletters is described in the Nordic Semiconductor Privacy Policy.
3. Retention period
We will store your personal data for as long you use the Nordic Developer Academy. If our systems register that you have not used your account for 36 months, your account will be deleted.
4. Additional information
Additional information on how we process personal data can be found in the Nordic Semiconductor Privacy Policy and Cookie Policy.
Nordic Developer Academy Terms of Service
1. Introduction
These terms and conditions (“Terms of Use”) apply to the use of the Nordic Developer Academy, provided by Nordic Semiconductor ASA, org. nr. 966 011 726, a public limited liability company registered in Norway (“Nordic Semiconductor”).
Nordic Developer Academy allows the user to take technical courses related to Nordic Semiconductor products, software and services, and obtain a certificate certifying completion of these courses. By completing the registration process for the Nordic Developer Academy, you are agreeing to be bound by these Terms of Use.
These Terms of Use are applicable as long as you have a user account giving you access to Nordic Developer Academy.
2. Access to and use of Nordic Developer Academy
Upon acceptance of these Terms of Use you are granted a non-exclusive right of access to, and use of Nordic Developer Academy, as it is provided to you at any time. Nordic Semiconductor provides Nordic Developer Academy to you free of charge, subject to the provisions of these Terms of Use and the Nordic Developer Academy Privacy Policy.
To access select features of Nordic Developer Academy, you need to create a user account. You are solely responsible for the security associated with your user account, including always keeping your login details safe.
You will able to receive an electronic certificate from Nordic Developer Academy upon completion of courses. By issuing you such a certificate, Nordic Semiconductor certifies that you have completed the applicable course, but does not provide any further warrants or endorsements for any particular skills or professional qualifications.
Nordic Semiconductor will continuously develop Nordic Developer Academy with new features and functionality, but reserves the right to remove or alter any existing functions without notice.
3. Acceptable use
You undertake that you will use Nordic Developer Academy in accordance with applicable law and regulations, and in accordance with these Terms of Use. You must not modify, adapt, or hack Nordic Developer Academy or modify another website so as to falsely imply that it is associated with Nordic Developer Academy, Nordic Semiconductor, or any other Nordic Semiconductor product, software or service.
You agree not to reproduce, duplicate, copy, sell, resell or in any other way exploit any portion of Nordic Developer Academy, use of Nordic Developer Academy, or access to Nordic Developer Academy without the express written permission by Nordic Semiconductor. You must not upload, post, host, or transmit unsolicited email, SMS, or \”spam\” messages.
You are responsible for ensuring that the information you post and the content you share does not;
contain false, misleading or otherwise erroneous information
infringe someone else’s copyrights or other intellectual property rights
contain sensitive personal data or
contain information that might be received as offensive or insulting.
Such information may be removed without prior notice.
Nordic Semiconductor reserves the right to at any time determine whether a use of Nordic Developer Academy is in violation of its requirements for acceptable use.
Violation of the at any time applicable requirements for acceptable use may result in termination of your account. We will take reasonable steps to notify you and state the reason for termination in such cases.
4. Routines for planned maintenance
Certain types of maintenance may imply a stop or reduction in availability of Nordic Developer Academy. Nordic Semiconductor does not warrant any level of service availability but will provide its best effort to limit the impact of any planned maintenance on the availability of Nordic Developer Academy.
5. Intellectual property rights
Nordic Semiconductor retains all rights to all elements of Nordic Developer Academy. This includes, but is not limited to, the concept, design, trademarks, know-how, trade secrets, copyrights and all other intellectual property rights.
Nordic Semiconductor receives all rights to all content uploaded or created in Nordic Developer Academy. You do not receive any license or usage rights to Nordic Developer Academy beyond what is explicitly stated in this Agreement.
6. Liability and damages
Nothing within these Terms of Use is intended to limit your statutory data privacy rights as a data subject, as described in the Nordic Developer Academy Privacy Policy. You acknowledge that errors might occur from time to time and waive any right to claim for compensation as a result of errors in Nordic Developer Academy. When an error occurs, you shall notify Nordic Semiconductor of the error and provide a description of the error situation.
You agree to indemnify Nordic Semiconductor for any loss, including indirect loss, arising out of or in connection with your use of Nordic Developer Academy or violations of these Terms of Use. Nordic Semiconductor shall not be held liable for, and does not warrant that (i) Nordic Developer Academy will meet your specific requirements, (ii) Nordic Developer Academy will be uninterrupted, timely, secure, or error-free, (iii) the results that may be obtained from the use of Nordic Developer Academy will be accurate or reliable, (iv) the quality of any products, services, information, or other material purchased or obtained by you through Nordic Developer Academy will meet your expectations, or that (v) any errors in Nordic Developer Academy will be corrected.
You accept that this is a service provided to you without any payment and hence you accept that Nordic Semiconductor will not be held responsible, or liable, for any breaches of these Terms of Use or any loss connected to your use of Nordic Developer Academy. Unless otherwise follows from mandatory law, Nordic Semiconductor will not accept any such responsibility or liability.
7. Change of terms
Nordic Semiconductor may update and change the Terms of Use from time to time. Nordic Semiconductor will seek to notify you about significant changes before such changes come into force and give you a possibility to evaluate the effects of proposed changes. Continued use of Nordic Developer Academy after any such changes shall constitute your acceptance of such changes. You can review the current version of the Terms of Use at any time at https://academy.nordicsemi.com/terms-of-service/
8. Transfer of rights
Nordic Semiconductor is entitled to transfer its rights and obligation pursuant to these Terms of Use to a third party as part of a merger or acquisition process, or as a result of other organizational changes.
9. Third Party Services
To the extent Nordic Developer Academy facilitates access to services provided by a third party, you agree to comply with the terms governing such third party services. Nordic Semiconductor shall not be held liable for any errors, omissions, inaccuracies, etc. related to such third party services.
10. Dispute resolution
The Terms of Use and any other legally binding agreement between yourself and Nordic Semiconductor shall be subject to Norwegian law and Norwegian courts’ exclusive jurisdiction.
Switch language?
Progress is tracked separately for each language. Switching will continue from your progress in that language or start fresh if you haven't begun.
Your current progress is saved, and you can switch back anytime.
•This release includes Long-Term Support (LTS) for five years.
•Patch (minor) releases will address security vulnerabilities and critical bug fixes.
•API stability is guaranteed; breaking changes are only introduced when required by a security fix.
•Notifications for critical bug fixes and security updates via the myNordic notification system (mynordic.nordicsemi.com)
General updates
•Support for nRF54LS05 DK (Available through the early access sampling program) •Support for the nRF54LM20B with Axon NPU for Edge AI applications
Bluetooth LE updates
•Quality of Service module is now production-ready. •New experimental features for RF testing (Direct Test Mode) and low-latency packet handling (LE Flushable ACL).
MCUboot & Partition Manager
•Single-Slot DFU and RAM Load mode are both promoted to fully supported •Partition Manager is officially deprecated in favor of Zephyr's devicetree-based partitioning.